When it comes to autonomous driving, the ability to accurately predict the movement of nearby vehicles and pedestrians is crucial for ensuring safety. Unfortunately, existing solutions often struggle in accurately understanding driving scenarios or lack efficiency in their predictions. However, a breakthrough has been made by a research team at the City University of Hong Kong (CityU). Led by Professor Wang Jianping from the Department of Computer Science, the team has developed a novel AI system that not only improves predictive accuracy but also increases computational efficiency by over 85%, bringing great potential for enhancing the safety of autonomous vehicles.
In order to overcome the limitations of existing solutions, Professor Wang and her team introduced a groundbreaking trajectory prediction model called “QCNet.” This model is based on the principle of relative space-time positioning, which gives it excellent properties such as “roto-translation invariance in the space dimension” and “translation invariance in the time dimension.” These properties allow the model to extract unique and fixed position information from driving scenarios, regardless of the viewer’s space-time coordinate system. By caching and reusing previously computed encodings of coordinates, the prediction model can operate in real-time, effectively reducing redundant computations and latency in online predictions.
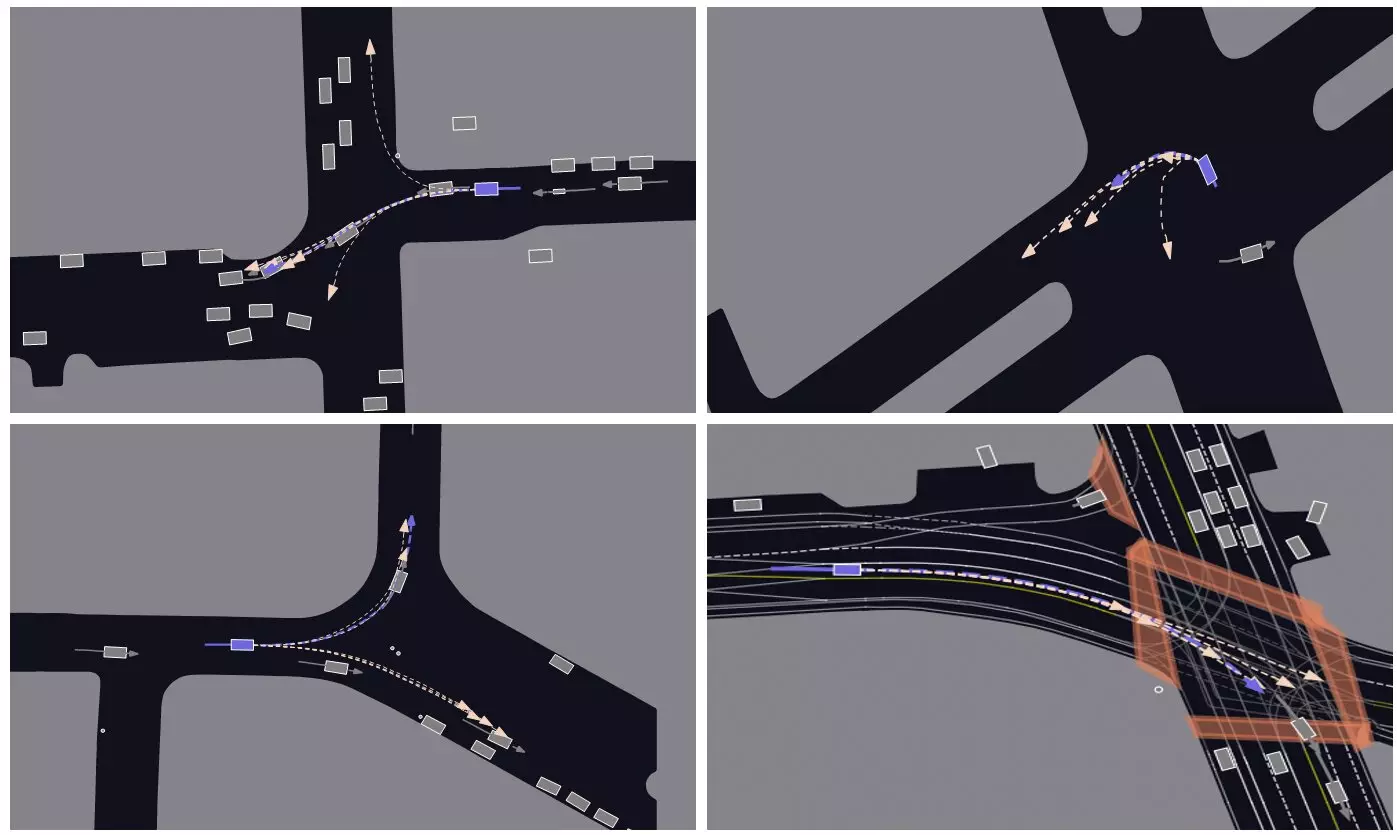
The QCNet model incorporates the relative positions of road users, lanes, and crosswalks, which allows for a better understanding of their relationships and interactions in driving scenarios. This enhanced understanding of the rules of the road and the interactions among multiple road users enables the model to generate collision-free predictions while accounting for uncertainty in the future behavior of road users. This breakthrough in understanding driving scenarios is a significant step towards safer and more reliable autonomous driving.
To evaluate the effectiveness of QCNet, the research team utilized two large-scale open-source datasets called “Argoverse 1” and “Argoverse 2.” These datasets consist of over 320,000 sequences of data and 250,000 scenarios, making them the most challenging benchmarks for behavior prediction. In testing, QCNet demonstrated both speed and accuracy in predicting road users’ future movements. It ranked first among 333 prediction approaches on Argoverse 1 and 44 approaches on Argoverse 2. Notably, QCNet also significantly reduced online inference latency from 8ms to 1ms and increased efficiency by over 85% in dense traffic scenes involving a large number of road users and map polygons.
By integrating this revolutionary AI system into autonomous driving systems, vehicles can effectively understand their surroundings, predict the future behavior of other users more accurately, and make safer and more human-like decisions. This breakthrough paves the way for safe autonomous driving and has immense potential for improving various applications in the field. Professor Wang and her team plan to apply this technology to traffic simulations and further enhance human-like decision-making in autonomous driving systems.
The research findings were presented at the IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR 2023), an annual academic conference in computer vision. This year, the conference was held in Canada, and the research was presented under the title “Query-Centric Trajectory Prediction.” The first author of the study is Mr. Zhou Zikang, a Ph.D. student in Professor Wang’s research group at CityU, while Professor Wang is the corresponding author. Collaborators from the Hon Hai Research Institute and Carnegie Mellon University also contributed to the research. The findings will be integrated into Hon Hai Technology Group’s autonomous driving system, further enhancing real-time prediction efficiency and self-driving safety.
The novel AI system developed by the research team at City University of Hong Kong brings unprecedented advancements in the predictive accuracy and computational efficiency of autonomous vehicles. With its unique trajectory prediction model, the AI system enhances the understanding of driving scenarios and enables vehicles to make safer decisions. This breakthrough has the potential to revolutionize the field of autonomous driving and pave the way for a future where self-driving vehicles are not only safe but also seamlessly integrated into our everyday lives.
Leave a Reply