Soft robot technology has taken another leap forward with the development of a “brainless” robot capable of navigating complex and dynamic environments. In a recent study published in the journal Science Advances, researchers from North Carolina State University showcased a soft robot that can autonomously navigate through twisty mazes and maneuver around moving obstacles. The key to its advanced capabilities lies in a concept called physical intelligence, which allows the robot to rely on its structural design and material properties rather than external guidance.
Building on Previous Success
The research team had previously created a soft robot capable of maneuvering through simple obstacle courses. However, this earlier version had limitations. It could only turn when it encountered an obstacle, often leading to the robot getting stuck between parallel objects. In the quest to overcome this challenge, the team developed a new design that enables the robot to turn on its own, facilitating navigation through more intricate mazes.
At the heart of this breakthrough is the concept of physical intelligence. Unlike traditional robots guided by computer algorithms or human intervention, soft robots with physical intelligence exhibit behavior that emerges from their structural design and the materials they are made of. In this case, the robot is constructed using ribbon-like liquid crystal elastomers. When placed on a surface heated to at least 55°C (131°F), the part of the ribbon in contact with the surface contracts, inducing a rolling motion. The robot’s speed of rolling increases with higher surface temperatures.
An Asymmetrical Design
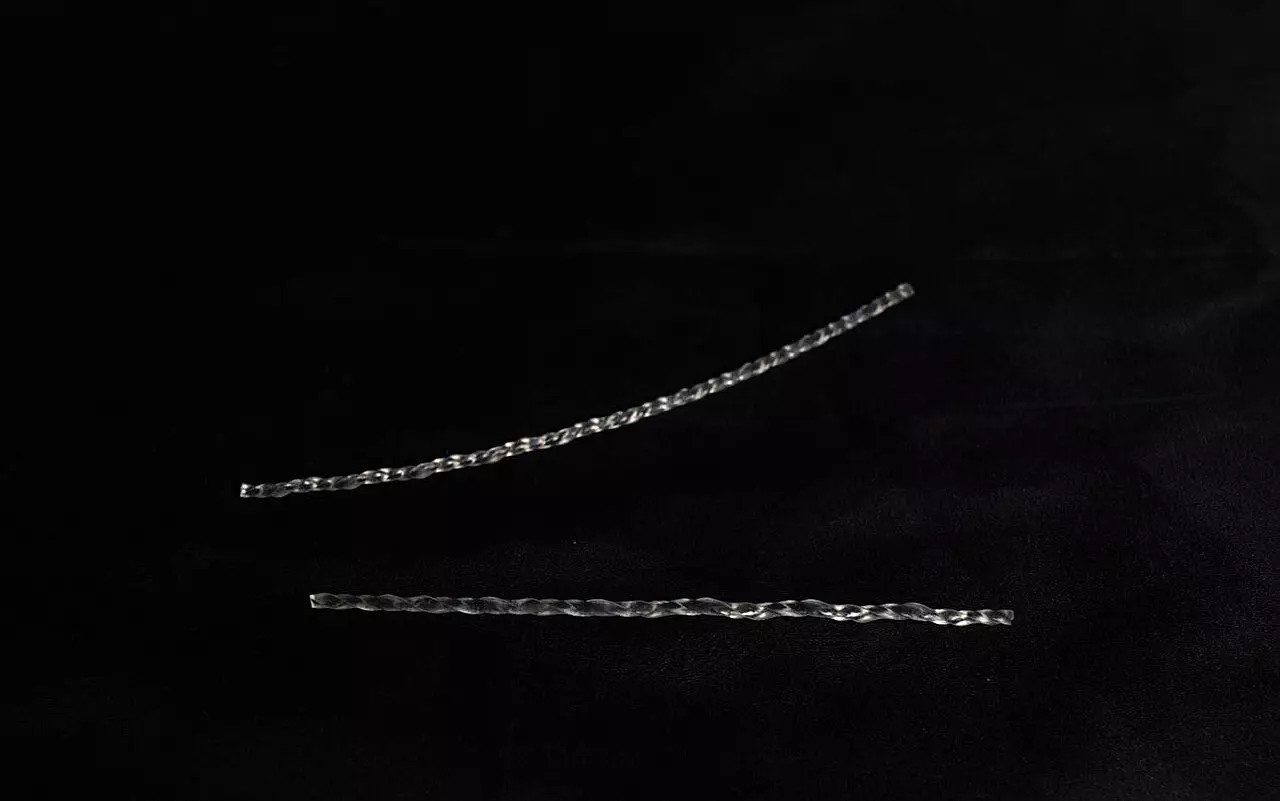
The novel soft robot design features two distinct halves, unlike the symmetrical earlier version. One half resembles a twisted ribbon extending in a straight line, while the other half is tightly twisted and spirals like a staircase. The asymmetry means that one end of the robot applies more force to the ground than the other, resulting in a curved trajectory similar to a plastic cup with a wider mouth than its base. Consequently, the robot can turn without making physical contact with an object, allowing it to navigate mazes and effectively avoid getting stuck between parallel obstacles.
To demonstrate the capabilities of the asymmetrical soft robot, the researchers conducted experiments involving increasingly complex mazes, including those with moving walls. Not only did the robot successfully navigate these mazes, but it also managed to fit through spaces narrower than its body size. The experiments were conducted on both a metal surface and in sand, showcasing the robot’s versatility.
Future Applications
The development of this advanced soft robot design opens up exciting possibilities for various applications. One particular area of interest is the harvest of heat energy from the robot’s environment. Soft robots equipped with physical intelligence could potentially convert thermal energy into mechanical work, making them efficient and self-sustaining in certain scenarios.
The soft robot field has experienced a significant breakthrough with the creation of an asymmetrical robot capable of navigating complex environments. By relying on its physical intelligence rather than external guidance, this robot represents an important step towards the development of innovative soft robot designs. As researchers continue to explore the applications and possibilities of soft robot technology, it is clear that physical intelligence will play a crucial role in shaping the future of robotics.
Leave a Reply