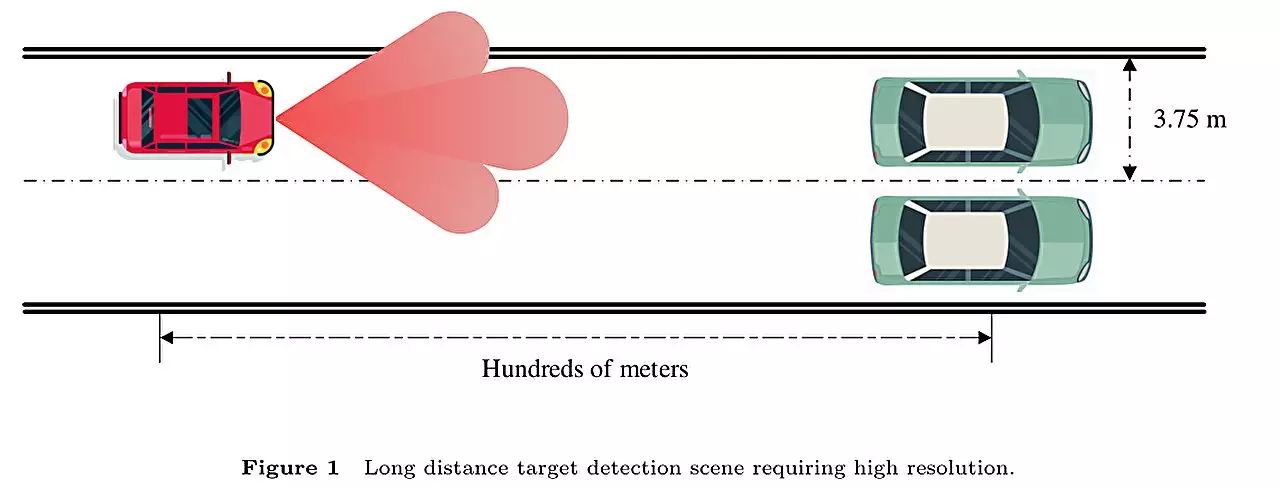
Accurate direction of arrival (DOA) estimation is crucial for various radar perception tasks, including target detection, tracking, and imaging. In the context of automotive millimeter-wave radars, there is a growing need for high-speed and long-distance target detection. To meet these requirements, deep learning (DL)-based DOA estimation methods have emerged as promising solutions. However, most existing DL-based methods suffer from grid mismatch problems, which limit their estimation accuracy and super-resolution ability. In this article, we present a novel DL framework that addresses these challenges and achieves high-precision super-resolution DOA estimation.
The novel DL framework consists of two main parts: a multi-label classification task and a regression task. In the first part, the DL network performs a multi-label classification to estimate DOA on a rough grid. The output from this part provides an initial estimation of the DOAs. In the second part, a regression task is employed to estimate the offset between the real DOAs and the grid, based on the previous classification result. This regression task ensures that the estimation is conducted on a continuous domain, improving the accuracy of DOA estimation. Additionally, skip connections are utilized to preserve high-resolution features of the original data, enhancing the network’s ability to distinguish adjacent sources.
The proposed DL framework offers several advantages over existing methods:
1. Grid Mismatch Problem: One of the main limitations of DL-based DOA estimation methods is the grid mismatch problem. The proposed framework considers this issue and aims to improve the estimation accuracy by addressing the grid mismatch problem.
2. Regression for Offset Estimation: By modeling the offset estimation as a regression task, the proposed framework ensures that the estimation is performed on a continuous domain. This approach enhances the precision of DOA estimation.
3. Simultaneous Estimation: The novel network framework allows for the simultaneous estimation of on-grid DOAs and grid offset. This feature enables high-precision super-resolution DOA estimation, even for adjacent sources.
To evaluate the effectiveness of the proposed DL framework, extensive experiments were conducted using both simulation and real data. In the simulation experiments, a uniform linear array configuration with 12 elements and a half-wavelength interelement distance were adopted.
The experimental results demonstrated that the proposed method achieved stable DOA estimation with minimal errors. Moreover, the statistical characteristics of the proposed method were compared with various traditional DOA estimation methods and other DL-based methods. Through Monte Carlo simulations, the performance of each method was tested under different signal-to-noise ratios (SNRs), number of snapshots, and angle intervals. The experimental results revealed that the proposed method showed good adaptability to low SNRs and small snapshots, along with a strong resolution ability for sources with small angle intervals. The proposed method outperformed other DL-based methods and traditional methods in several cases.
Furthermore, the proposed method was also tested on real data using a large number of samples collected as training data. The trained model was then evaluated using a sample not included in the training set. The results indicated that the proposed method accurately estimated the DOAs of closely located real targets, outperforming other methods.
This article presented a novel DL framework for DOA estimation, particularly in the context of automotive millimeter-wave radars. The proposed framework addressed the grid mismatch problem and achieved high-precision super-resolution DOA estimation. The experimental results demonstrated the effectiveness of the proposed method, showcasing its superiority over existing DL-based methods and traditional methods. This novel DL framework holds great potential for enhancing the performance of DOA estimation in radar perception tasks and can contribute to the advancement of various radar applications including target detection, tracking, and imaging.
Leave a Reply